The RDC Software
RDC - Robot Dimension Control
The RDC is an intuitive control software for a wide variety of robot kinematics and hardware types. Its free for maker and highly customizable for OEM!
Compatible Hardware
How to connect your robot
The modular setup allows to connect robots using different hardware interfaces. Choices reach from simple step/dir interfaces for stepper motors up to high performance CANopen drives. Manufacturer specific protocols are already available, e.g. Robotis and Lynxmotion.
-
Cost effective:
Stepper Motors
The most cost effective solution is to use standard stepper motors with step/direction interfaces, and a PoKeys motion controller by PoLabs. This motion controller receives the ste point values via Ethernet or USB from the RDC and sets the motors accordingly.
See an Example! Find out about RDC with PoKeys!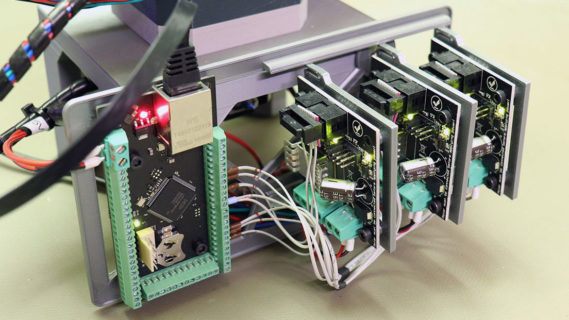
-
High Performance:
CANopen
RDC speaks CANopen, so it is easy to connect actuators of different type and performance!
See and example! Find out about CANopen modules!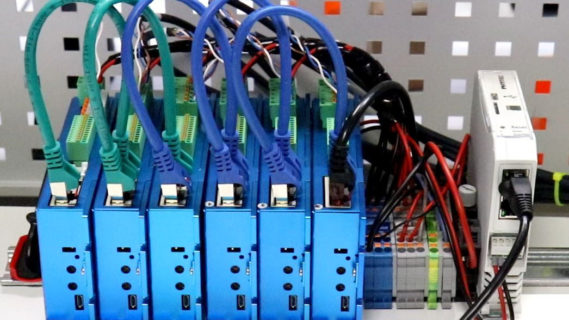
-
Adapted to the requirements!
OEM Motor Controller
Rail mounted open loop / closed loop motor controller by Commonplace Robotics. The motor controllers custom CAN communication protocol has been added to the RDC software.
See an Example! Browse the OEMs and compatible Hardware!
Features
From 3D user interface to digital outputs
User Interface
- 3D graphical user interface with drag interaction
- Complete offline simulation
- Design based on Office guidelines
- Program editor
Kinematics and IO
- Kinematics with up to 6 joints plus 3 additional external joints
- 4/5/6 DOF (degree of freedom) robot arms
- 2/3 DOF gantry robots
- Rotational and linear delta robots
- SCARA robots LRRR and RRLR
- Palletizing robots
- up to 64 digital inputs and outputs
Compatible Hardware
- Step/Dir with motion controller
- CANopen
- Robotis Protocol V2
- Lynxmotion SSC-32U
- OEM protocols e.g. Commonplace Robotics CANV2
Platform
- RDC for Windows (standard)
- RDC for Linux on PC, RaspberryPi or other embedded systems (OEM)
- RDC for Windows with RT extension (OEM)